發(fā)布時間:2023年06月29日 08:40 來源:中國新聞網(wǎng)

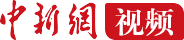
近日,施普林格·自然旗下學術(shù)期刊《自然-通訊》最新發(fā)表一篇工程學論文,研究人員受動物啟發(fā)研發(fā)出一個綽號為“Morphobot”(M4)的變形機器人,能通過輪子、螺旋槳、腿部和手部間的附件,在陸地上的各種地形和空中移動。
這個機器人受到禽類、狐獴、海豹這類動物的啟發(fā),能通過不同運動模式探索周圍環(huán)境,包括飛行、旋轉(zhuǎn)、爬行、匍匐、平衡和翻滾。該研究結(jié)果或有助于設(shè)計出能穿越各類環(huán)境的機器人,如用于自然災害搜救、太空探索和自動包裹遞送的機器人。
據(jù)論文介紹,一些動物能調(diào)整它們的肢體用途,應對不同的地形。比如,海獅能用鰭狀肢在地上行走,狐獴靠后肢站立來偵察周圍環(huán)境,石雞能在翅膀的幫助下用四肢攀爬陡坡。通過模擬動物改變四肢用途的能力,擁有多功能肢體的移動機器人能調(diào)整移動策略來穿越復雜地形。
受到動物啟發(fā),論文通訊作者、美國東北大學Alireza Ramezani和同事與合作者設(shè)計出變形機器人M4,它有四條腿,每條腿有兩個關(guān)節(jié),腿末端還有固定的涵道風扇。該機器人重6千克、長70厘米、高35厘米、寬35厘米。涵道風扇的功能可在腿、螺旋槳推進器或輪子之間切換。同時,M4能適應在崎嶇地面上行走,攀越陡坡,滾過大型障礙物,在高處飛行,以及在低矮通道匍匐前進。
論文作者總結(jié)稱,他們的研究結(jié)果證明設(shè)計有多功能附肢機器人的優(yōu)勢,這類機器人可穿越各種有挑戰(zhàn)的不同地形。論文作者還提供一組視頻,對受動物啟發(fā)研發(fā)的變形機器人進行演示。(記者 孫自法 制作 樂小敏 視頻來源 施普林格·自然)
責任編輯:【房家梁】
 京公網(wǎng)安備 11010202009201號] [京ICP備2021034286號-7] [互聯(lián)網(wǎng)宗教信息服務(wù)許可證:京(2022)0000118;京(2022)0000119]
京公網(wǎng)安備 11010202009201號] [京ICP備2021034286號-7] [互聯(lián)網(wǎng)宗教信息服務(wù)許可證:京(2022)0000118;京(2022)0000119]